from compas.geometry import Polyline
from compas_wood.binding import beam_volumes
input_polylines = [
Polyline([
[-5, -5, 0],
[-5, 5, 0]
]),
Polyline([
[-5, 5, 0],
[5, 5, 0]
]),
Polyline([
[5, 5, 0],
[5, -5, 0]
]),
Polyline([
[5, -5, 0],
[-5, -5, 0]
]),
]
input_polylines_segment_radii = []
for i in range(len(input_polylines)):
input_polyline_segment_radii = []
for j in range(len(input_polylines[i].points)):
input_polyline_segment_radii.append(0.2)
input_polylines_segment_radii.append(input_polyline_segment_radii)
input_polylines_segment_direction = []
for i in range(len(input_polylines)):
input_polyline_segment_direction = []
for j in range(len(input_polylines[i].points)-1):
input_polyline_segment_direction.append([0, 0, 1])
input_polylines_segment_direction.append(input_polyline_segment_direction)
index_polylines, index_polylines_segment, distance, point_pairs, volume_pairs, joints_areas, joints_types = beam_volumes(
input_polylines,
input_polylines_segment_radii,
input_polylines_segment_direction,
input_allowed_types_per_polyline=[0],
input_min_distance=1,
input_volume_length=5,
input_cross_or_side_to_end=2.01,
)
try:
from compas_viewer import Viewer
from compas.geometry import Scale
from compas.geometry import Polygon
colors = {
10: (255, 0, 0), # Side-to-side rotated
11: (0, 255, 0), # Side-to-side out-of-plane
12: (0, 0, 255), # Side-to-side in-plane
13: (100, 100, 100), # Side-to-side in-plane
20: (255, 0, 150), # Top-to-side
30: (0, 200, 255) # Cross
}
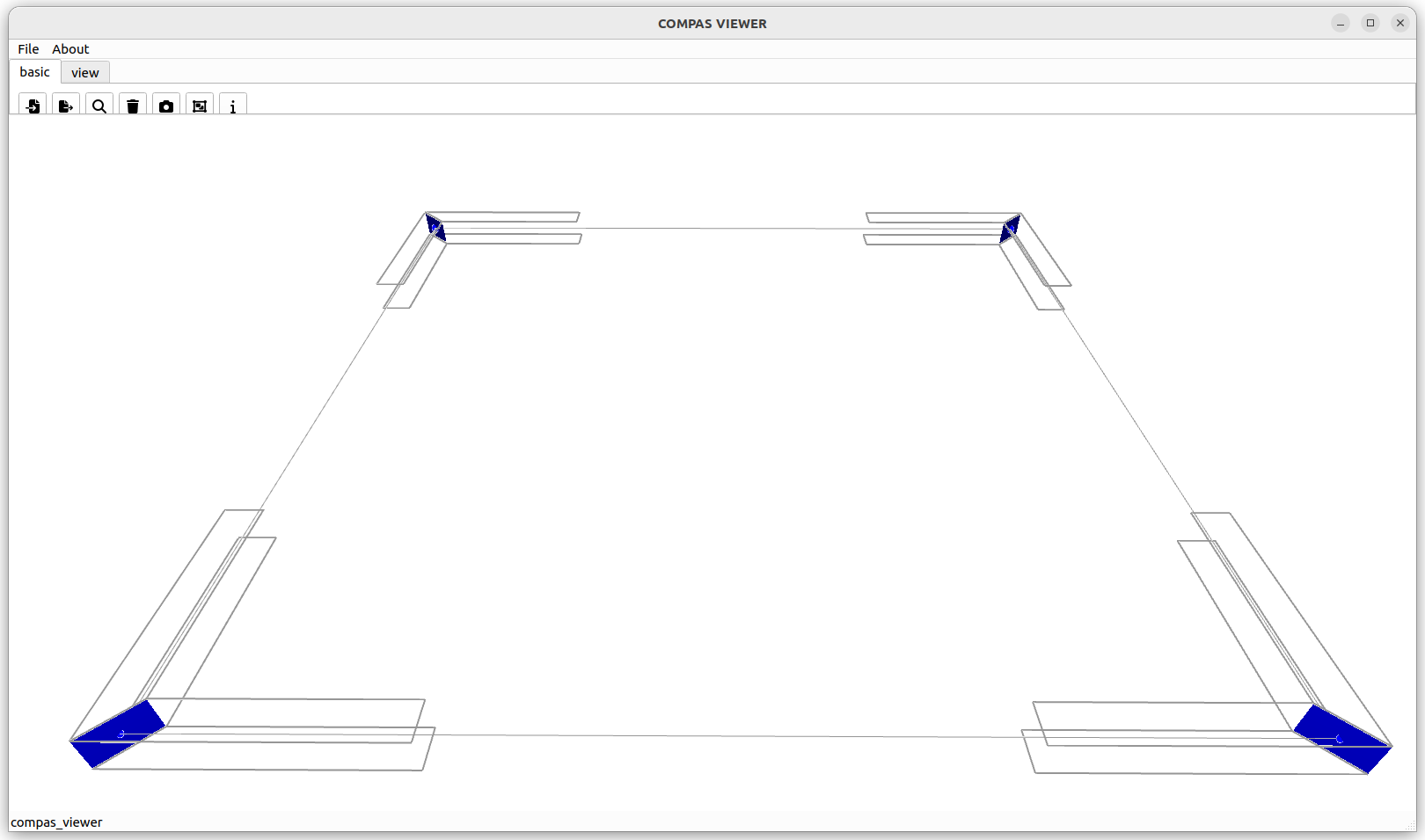
viewer = Viewer(show_grid=False, rendermode='lighted')
scale = 1e-0
for polyline in input_polylines:
polyline.transform(Scale.from_factors([scale, scale, scale]))
viewer.scene.add(polyline, show_points=False, lineswidth=1, linecolor=(150, 150, 150))
for id, p in enumerate(point_pairs):
for point in p:
point.transform(Scale.from_factors([scale, scale, scale]))
viewer.scene.add(point, size=10, pointcolor=colors[joints_types[id]])
for volume in volume_pairs:
for polyline in volume:
polyline.transform(Scale.from_factors([scale, scale, scale]))
viewer.scene.add(polyline, show_points=False, lineswidth=2, linecolor=(150, 150, 150))
for id, joint_area in enumerate(joints_areas):
joint_area.transform(Scale.from_factors([scale, scale, scale]))
viewer.scene.add(Polygon(joint_area.points[:-1]).to_mesh(),
show_points=False,
show_lines=False,
facecolor=colors[joints_types[id]])
viewer.show()
except ImportError:
print("compas_viewer is not installed.")